Prototype Log
This is were you get details on each specific model. Choose from the prototypes below.
|
 2018 Proto 10 (current)
2018 Proto 10 (current)
| |

|
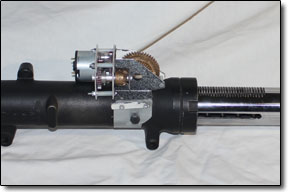
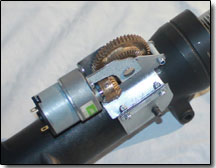
History: Prototype 10 changed the bevel gears to a module of 1.0 and additional support was added to reduce the chances of breaking teeth. Also, the gearbox was redesigned for the larger gears.
Test Results: The Weight was increased about 2.5 ounces over the prototype 9, which was still less than the stock suspension. Otherwise, the functionality was the same as the Proto 9 design.
|
|
 2017 Proto 8 and 9
2017 Proto 8 and 9
| |
|
History: Prototype 8 was basically a redesign of prototype 6. The primary gears were changed to a module of 0.8 to reduce the chances of breaking teeth, and the total friction in the gear box was reduced as much as possible. Prototype 9 used the same basic design as prototype 8, but fixed several alignment and construction flaws.
Test Results: Prototype 8 weighed approximately 6.5 pounds, which was about 1 pound less than the stock suspension. Both prototypes 8 and 9 eliminated the problems encountered with prototypes 6 and 7, so they were mounted on the test vehicle for final testing. (As seen in the
Proto 9 demo video.) Unfortunately, prototype 9 only lasted about 75 miles before various failures appeared.
|
|
|
2017 Proto 7
| |

|
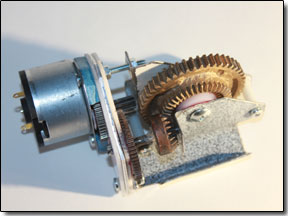
History: Prototype 7 was a fast replacement for prototype 6. It uses a geared motor from prototype 3 and the brass bevel gear I made for prototype 6. I replaced the plastic gear in the gearbox with a metal one and made a brass beveled pinion gear to fit over the gearbox shaft.
Test Results: The Prototype 7 weighed approximately 6 pounds, which is about 1.5 pounds less than the stock suspension did with hydraulic parts. This prototype eliminated most of the problems found with the 3rd prototype, but since the gearbox shaft of the prototype 7 was only supported at the gearbox it experienced excessive torque at the pinion end. Under certain conditions the shaft's movement allowed the pinion to jump teeth. Also, the 0.5 module gears could not handle the force, so the teeth broke off.
|
|
|
2017 Prototype 6
| |
|
History: This prototype used actual motorcycle forks with the hydraulic parts removed and generic gears for the gear box. The sprocket of prototype 3 was replaced with a brass gear similar to the one I designed for the prototype 5. Basically, Prototype 6 was made to be easy to modify and service, just like the prototype 5 design.
Test Results: Unfortunately, this prototype 's gearbox had too much friction. The brass gears I made worked correctly, but the generic gears I purchased had large fictional surfaces. The friction was so great that the suspension would not move with less than 40 pounds of force. It was definitely an overdamped situation.
|
|
|
2016 Proto 5 (only concept art)
| |
|
History: This prototype was never built because no one was able to machine the gears in steel. Apparently, the material costs were low, because the gears were small, but the precision machining would take longer than normal. Unfortunately, I did not have the time or machinery to make all of them myself; nevertheless, this design was used as the basis for future prototypes because it had obvious solutions to the failures found in prototypes 1 though 3.
Test Results: None
|
|
|
2015 Proto 4 (proof of concept)
| |

|
History: After failures with prototypes 1-3, prototype 4 was constructed specifically to test the electromechanical suspension's performance on a vehicle in controlled conditions. Basically, spare parts were used to assemble a small 3-wheeled vehicle with a swing arm attached to a geared motor and driven with a microcontroller and accelerometer setup. During testing a passenger was needed, so weight was added to the end of a spring and mounted near the front of the vehicle. (The weighted spring, like holding an egg with a spoon, measures acceleration and therefore passenger comfort.) The results were used to write the patent and a
video was made. The video shows a run with the motor disconnected from the suspension, but all of the parts were left mounted to the vehicle to maintain the same weight and balance for a comparison later. Then the battery and geared motor were re-connected and the results were charted.
Test Results: This was the first real test of the suspension on a vehicle. After the microcontroller was properly coded, the performance was flawless and the suspension's batteries were being charged as a side-effect. Testing included various surfaces. The movement on a street surface was so smooth that the passenger (just weight on a spring) had no visible displacement, so the surface elevation was increased by rolling it off a stack of books. The suspension functioned at a height of almost half the wheel, which is roughly 10 inches for a standard four-door car. (The standard sidewalk curb is 6 inches tall.)
|
|
|
2013 Prototypes 1 thru 3
| |


|
History: These prototypes were the first attempt at the mechanical side of the suspension. They showed potential, but also showed their obvious weaknesses. Several parts were swapped and others were reinforced, but eventually they would have to be replaced/redesigned.
Test Results: Prototypes 1 to 3 were about 2.5 pounds each, which is about one-third the weight of the original shock they were meant to replace. The tubing was aluminum and the parts were relatively in-expensive. However, the geared motor had a plastic gear (probably to save the motor from damage) that would break leaving loose teeth stuck in the metal gears. Also, these prototypes used a sprocket to mesh with holes drilled into the inner aluminum tube. The geared motor was the only thing holding the steel sprocket in position and the motor was only mounted on a 1-plane surface, so the sprocket was able to eat away at the aluminum tube enough to make it skip holes. The geared motor mount was the biggest difference between the prototypes, but they all failed to handle excessive force. Also, having the gearbox's mounting bolts behind the sprocket made servicing difficult.
|
|
|